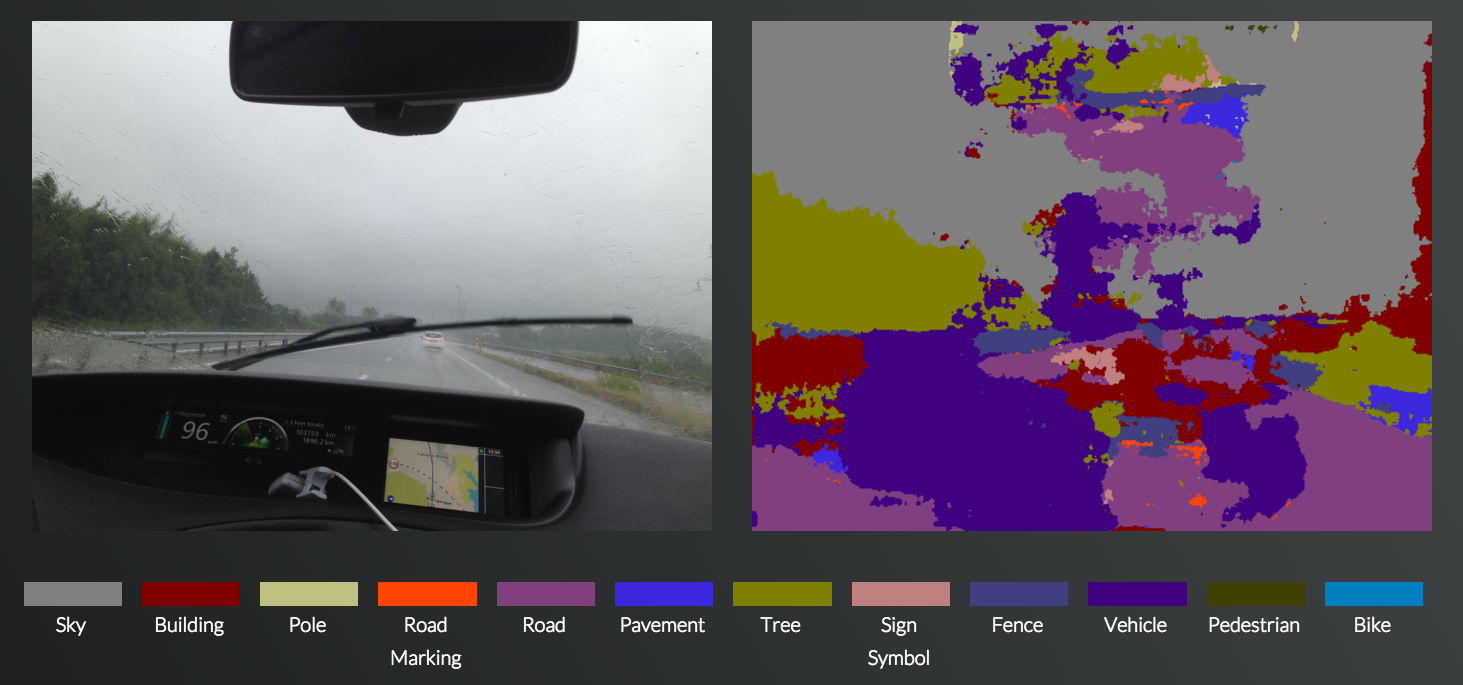
Recently I stumbled over SegNet, a tool which uses a convolutional decoder-encoder (type of neural net) to distinguish between 12 categories (like road, pedestrian, …) that a self-driving car might encounter. I tried this tool with several different pictures of roads and want to share the results with you. The big question is: Would I … Continue reading Testing SegNet on real world road scenes